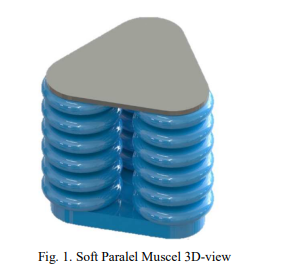
Design and FEA-based Methodology for a Novel 3 Parallel Soft Muscle Actuator
Recently, soft robotics represents a new era of advanced robotics systems. Based on the flexible nature of soft robots, they are more adequate to have safe interaction with humans and handle complex or delicate objects. Due to the nature of soft robotics, there is a crucial need to propose new designs, fabrication, and control systems suitable for the flexibility nature. In this research project, a novel three parallel soft muscle actuator is proposed. The proposed design and analytical models for predicting actuation behavior are based on a set of design parameters. First, the actuator modules are parametrically designed and identified with the aid of finite element analysis. The simulation was run at various pressures. The tip location was determined from the kinematic model as a function of pressure. The inverse kinematic model was built using ANN to calculate the pressure at the soft muscle tip. The MSE was 2.6778e-8 due to the ANN model's accuracy. © 2021 IEEE.