Self-Driving Car Lane-keeping Assist using PID and Pure Pursuit Control
Detection of lane boundaries is the primary role for monitoring an autonomous car's trajectory. Three lane identification methodologies are explored in this paper with experimental illustration: Edge detection, Hough transformation, and Birds eye view. The next step after obtaining the boundary points is to add a regulation rule to effectively trigger the regulation of steering and velocity to the motors. A comparative analysis is made between different steering controllers like PID or by using PID with a pure pursuit controller for the Lane Keeping Assist (LKA) system. A camera that sends
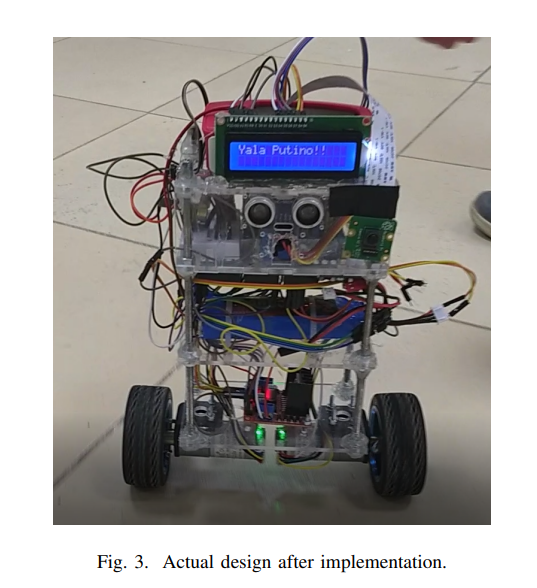
Hybrid Self-Balancing and object Tracking Robot Using Artificial Intelligence and Machine Vision
Over the past decade, mobile autonomous robots have been widely used efficiently for different applications. Recently, self-balancing robots attracted more attention and showed impressive performance. A self-balancing robot is simply a two-wheeled robot; hence it needs to be balanced vertically using a closed-loop control algorithm. In this paper, a new hybrid two-wheeled self-balancing robot is fully designed and implemented, which is able to track objects and to avoid obstacles efficiently. The proposed robot consists of a two-wheeled chassis equipped with an ultrasonic sensor, camera

FCM-based approach for locating visible videowatermarks
The increased usage demand for digital multimedia has induced significant challenges regarding copyright protection, which is the copy control and proof of ownership. Digital watermarking serves as a solution to these kinds of problems. Among different types of digital watermarking, visible watermarking protects the copyrights effectively, since the approach not only prevents pirates but also visually proves the copyright of the broadcasted video. A visible watermark could be in any location on the frame (corner, center, diagonal, etc.). In addition, it could either completely or partially
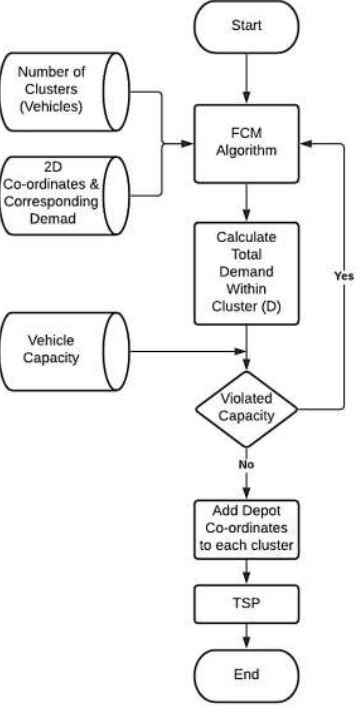
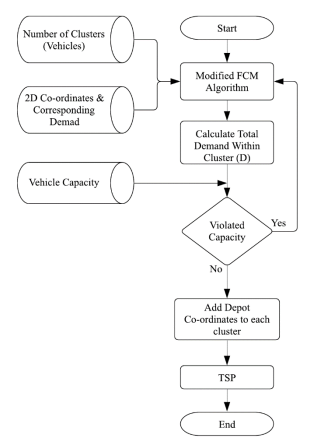
Modified fuzzy c-means clustering approach to solve the capacitated vehicle routing problem
Fuzzy C-Means clustering is among the most successful clustering techniques available in the literature. The capacitated vehicle routing problem (CVRP) is one of the most studied NP-hard problems. CVRP has attracted the attention of many researchers due to its importance within the supply chain management field. This study aims to develop a fuzzy c-means clustering heuristic to efficiently solve the CVRP with large numbers of customers by using cluster-first route-second method (CFRS). CFRS is a two-phase technique, where in the first phase customers are grouped into, and in the second phase
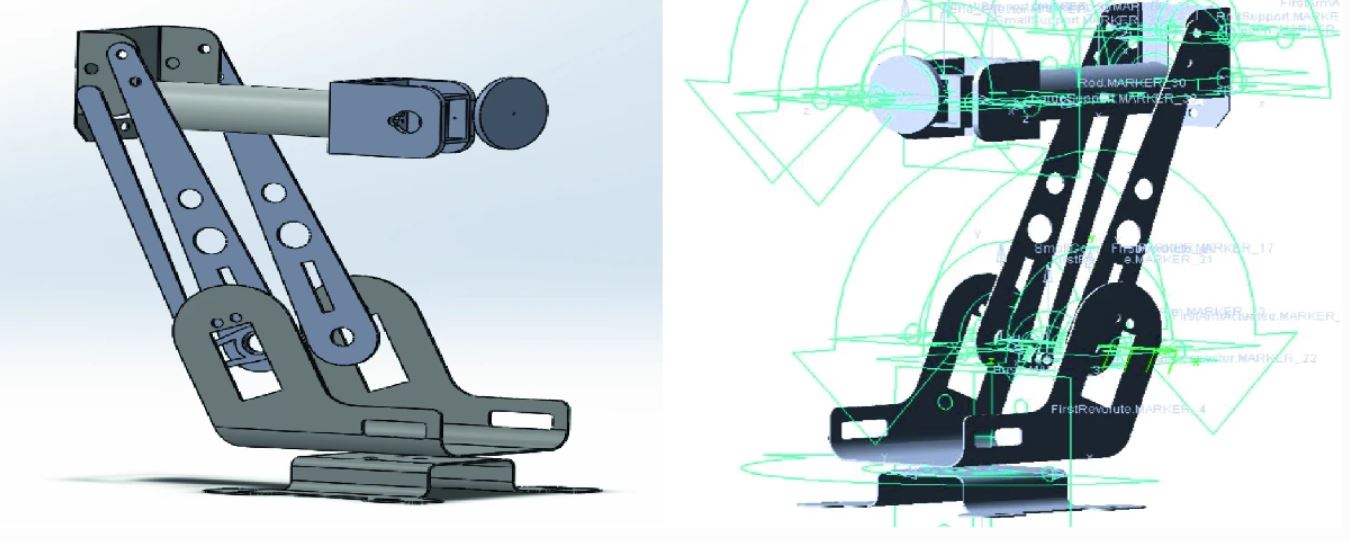
Experimental Kinematic Modeling of 6-DOF Serial Manipulator Using Hybrid Deep Learning
According to its significance, robotics is always an area of interest for research and further development. While robots have varying types, design and sizes, the six degrees of freedom (DOF) serial manipulator is a famous robotic arm that has a vast areas of applications, not only in industrial application, but also in other fields such as medical and exploration applications. Accordingly, control and optimization of such robotic arm is crucial and needed. In this paper, different analyses are done on the chosen design of robotic arm. Forward kinematics are calculated and validated, then

Gray Wolf Optimization of Fractional Order Control of 3-Omni Wheels Mobile Robot: Experimental Study
Committing robotics with artificial intelligence becomes mandatory collaboration with distinct environments. Omnidirectional Wheeled (Omni-WD) mobile robots are one of the robots that interact with humans in various circumstances, where it is important to function effectively and accurately. In this paper, the distinction of a 3WD-Omni model and control using machine vision is demonstrated. The use of fractional order (FO) calculus has been stated to increase the degrees of freedom of the controller over the integer ones. Hybridization of FO control and metaheuristics optimization is reported