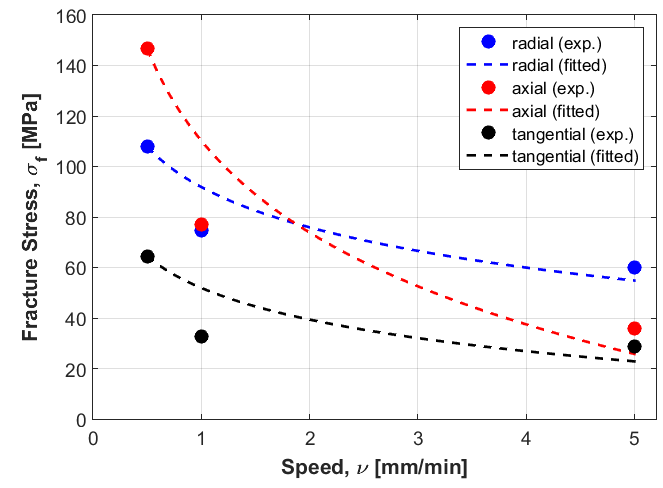
A logarithmic formulation for anisotropic behavior characterization of bovine cortical bone tissue in long bones undergoing uniaxial compression at different speeds
The mechanical properties of bone tissues change significantly within the bone body, since it is considered as a heterogeneous material. The characterization of bone mechanical properties is necessary for many studies, such as in prosthesis design. An experimental uniaxial compression study is carried out in this work on bovine cortical bone tissue in long bones (femur and tibia) at several speeds to characterize its anisotropic behavior. Several samples from different regions are taken, and the result selection is carried out considering the worst situations and failure modes. When
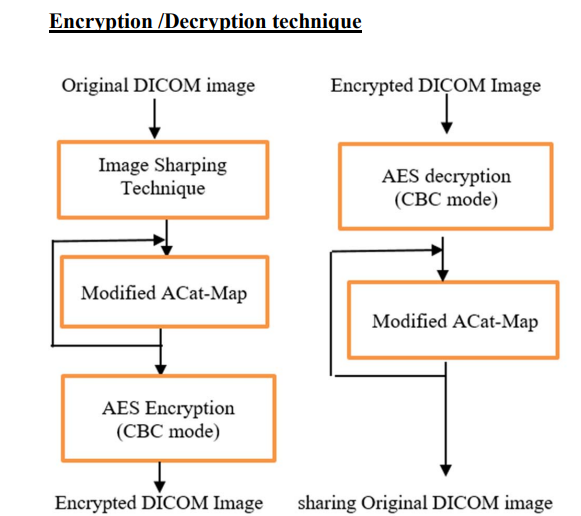
Enhanced Arnold's Cat Map-AES Encryption Technique for Medical Images
Human's health information is considered momentous information, which is represented in medical systems. The amount of medical image information available for analysis is increasing with the modern medical image devices and biomedical image processing techniques. To prevent data modification from unauthorized persons from an insecure network, medical images should be encrypted efficiently. In this paper, a novel chaotic-based medical image encryption technique is proposed. This technique uses first a Butterworth High Pass Filter (BHPF) to enhance the medical image's details to avoid any
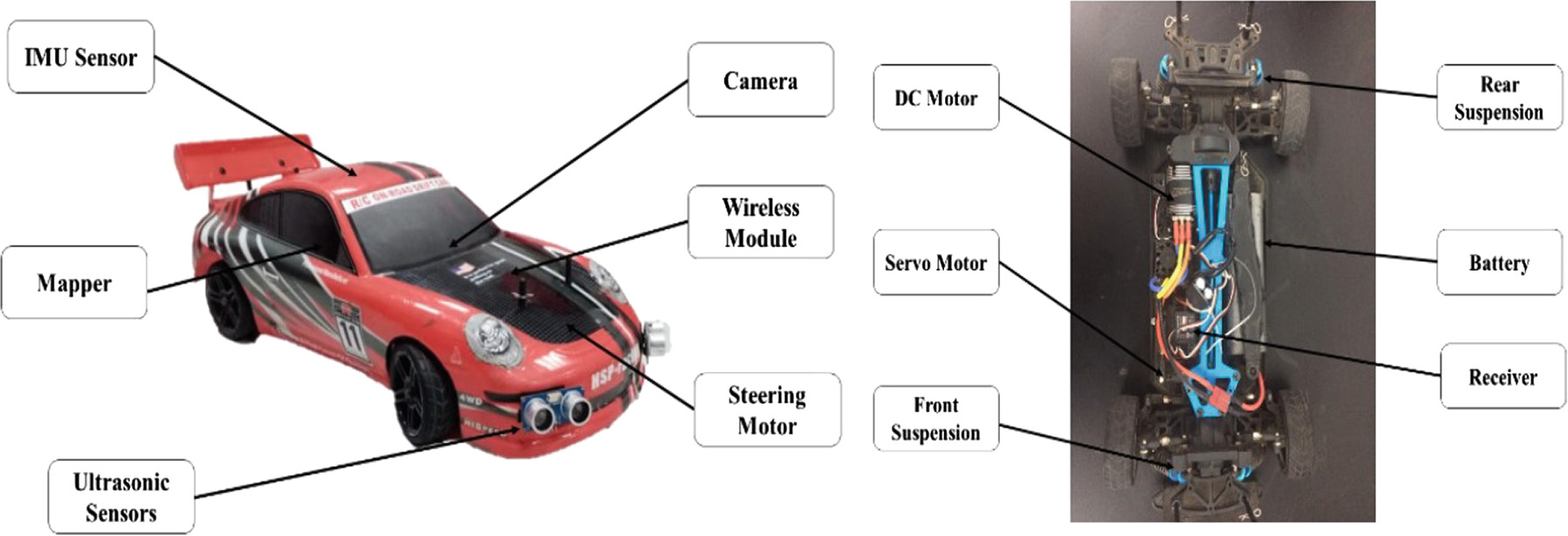
A Hybrid Deep Learning Based Autonomous Vehicle Navigation and Obstacles Avoidance
Technological revolution has reached all life activities starting from day planning reaching communication, entertainment, industry, and transportation. Each of previously mentioned categories get improved in a way making human life easier and safer. In the use of automatic control, several researches focused on automating vehicles’ systems to make driving easier and safer. The availability of autonomous vehicles will avoid accidents caused by taking a late decision or lack of driving experience in such situation. Approaching autonomous driving, an autonomous vehicle must be able to respond to

FCM-based approach for locating visible videowatermarks
The increased usage demand for digital multimedia has induced significant challenges regarding copyright protection, which is the copy control and proof of ownership. Digital watermarking serves as a solution to these kinds of problems. Among different types of digital watermarking, visible watermarking protects the copyrights effectively, since the approach not only prevents pirates but also visually proves the copyright of the broadcasted video. A visible watermark could be in any location on the frame (corner, center, diagonal, etc.). In addition, it could either completely or partially
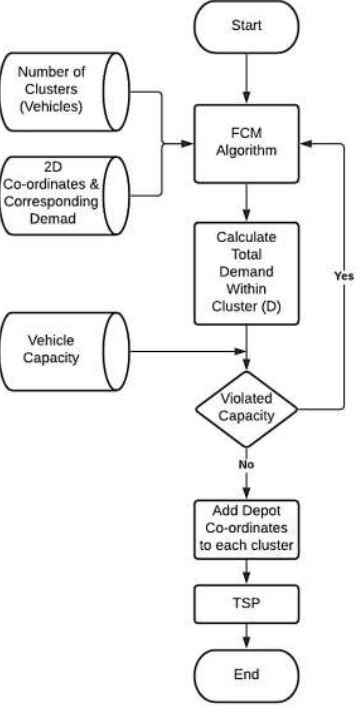
Modified fuzzy c-means clustering approach to solve the capacitated vehicle routing problem
Fuzzy C-Means clustering is among the most successful clustering techniques available in the literature. The capacitated vehicle routing problem (CVRP) is one of the most studied NP-hard problems. CVRP has attracted the attention of many researchers due to its importance within the supply chain management field. This study aims to develop a fuzzy c-means clustering heuristic to efficiently solve the CVRP with large numbers of customers by using cluster-first route-second method (CFRS). CFRS is a two-phase technique, where in the first phase customers are grouped into, and in the second phase
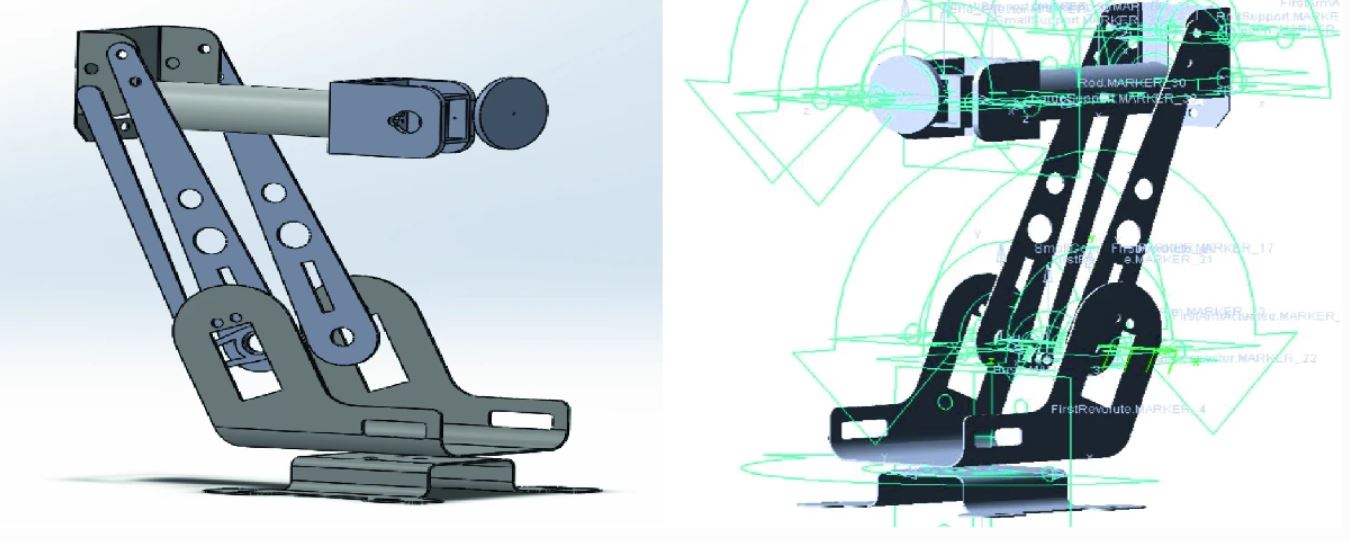
Experimental Kinematic Modeling of 6-DOF Serial Manipulator Using Hybrid Deep Learning
According to its significance, robotics is always an area of interest for research and further development. While robots have varying types, design and sizes, the six degrees of freedom (DOF) serial manipulator is a famous robotic arm that has a vast areas of applications, not only in industrial application, but also in other fields such as medical and exploration applications. Accordingly, control and optimization of such robotic arm is crucial and needed. In this paper, different analyses are done on the chosen design of robotic arm. Forward kinematics are calculated and validated, then
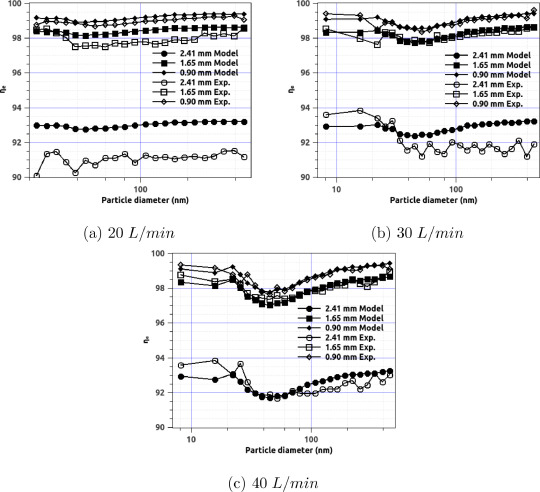
Numerical investigation of hematocrit variation effect on blood flow in an arterial segment with variable stenosis degree
Numerical simulations of blood flow in arteries are important in the understanding and diagnosis of many cardiovascular diseases, such as atherosclerosis and arterial stenosis. More realistic mathematical models representing blood rheology offer a better understanding of these diseases. In this study, blood is considered an Oldroyd-B fluid with a shear-thinning property and a shear rate-dependent relaxation time that is adopted by fitting experimental data. The Quemada model is used to represent the shear-thinning property with hematocrit variation. The stabilized finite element method is used

Centralized Multi-agent Mobile Robots SLAM and Navigation for COVID-19 Field Hospitals
In this paper we focus on the proof of concept prototype of fully autonomous centralized Multi-Robot System (MRS) consisting of a Hexapod walking robot and a six wheeled mobile robot. Recently, there has been an increasing demand for such systems as they can be involved in several tasks such as collaborative search and rescue, surveillance, monitoring, and disinfecting Field hospitals. To name a few, COVID-19 pandemic showed the weak points in the medical sector around the world, including those in the most advanced nations that had to go through hard decisions due to the lack of medical
Ergonomic analysis of a working posture in steel industry in Egypt using digital human modeling
This study presents solutions for improving a bending awkward posture in steel industry in Egypt using digital Human Modeling (DHM). The information is gathered by interviewing the workers, working postures are recorded via a video camera while the worker is performing his usual work. The postures are analyzed using DHM software. Porter comfort analysis and Rapid Upper Limb Assessment are applied for postures analysis. The analysis shows high levels of discomfort in neck, trunk, leg and forearm. These discomforts could cause permanent injuries over long periods. A modified design is proposed