

Modelling of Crime Record Management System Using Unified Modeling Language
Crime records management is a system that helps police keep records of citizens’ complaints files, investigation evidence and processes. In addition, it helps police keep records of the criminals who have been arrested or who are to be arrested. This paper aims to model the Crime Record Management System (CRMS) using various Unified Modeling Language (UML) diagrams, to demonstrate an explicit visualization of the system. Also, showing the communication among different actors, and the sequence of activities and interactions. The perspective of modeling the CRMS is by covering four stages, which
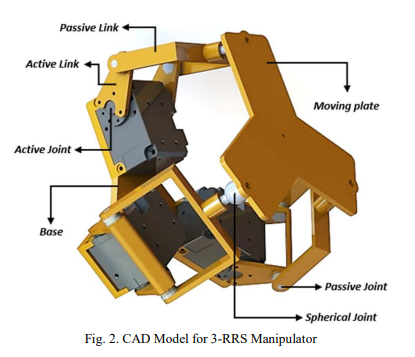
Design, simulation, and kinematics of 9-DOF Serial-Parallel Hybrid Manipulator Robot
Serial manipulator robot is one of the most advanced robots in the last decade. The demand for this type of robot leads the researchers to develop and improve the robot to increase its workspace, speed and to minimize the control complexity. This paper presents a novel robot configuration that combines a 6 DOF serial manipulator with a 3 DOF spherical parallel wrist. The serial manipulator is KUKA kr6 R900 type, which is a real industrial robot. At the same time, the parallel spherical wrist is 3-RRS type (Revolute- Revolute-Spherical Joint), which can support one translation movement in the Z

Regression Modeling for the Ventilation Effect on COVID-19 Spreading in Metro Wagons
The effect of different ventilation parameters on the infection potential of COVID-19 in a metro wagon is numerically studied. Two key indicators are used to quantify this potential. Based on the numerical results a regression analysis is performed to come up with the most suitable regression model for these key parameters. The proposed regression models are helpful in quantifying the infection risk at different ventilation scenarios. © 2021 IEEE.
Self-Driving Car Lane-keeping Assist using PID and Pure Pursuit Control
Detection of lane boundaries is the primary role for monitoring an autonomous car's trajectory. Three lane identification methodologies are explored in this paper with experimental illustration: Edge detection, Hough transformation, and Birds eye view. The next step after obtaining the boundary points is to add a regulation rule to effectively trigger the regulation of steering and velocity to the motors. A comparative analysis is made between different steering controllers like PID or by using PID with a pure pursuit controller for the Lane Keeping Assist (LKA) system. A camera that sends

Investigation of root causes of order unfulfillment: A Logistics case study
This study targets an order fulfillment problem in a freight forwarding company. Some applicable solutions are implemented such as supplier performance evaluation, suppliers' selection, and location analytics. The objective of the study is to reduce the number of unfulfilled orders by supply planning. Some of the tools used to achieve this are Excel (VBA and Pivot tables) to perform drivers' scoring, analytic hierarchy process (AHP), and ArcGIS software to visualize locations. The results showed that the company can implement the suggested solutions to reduce the number of order cancellations