
Filter by
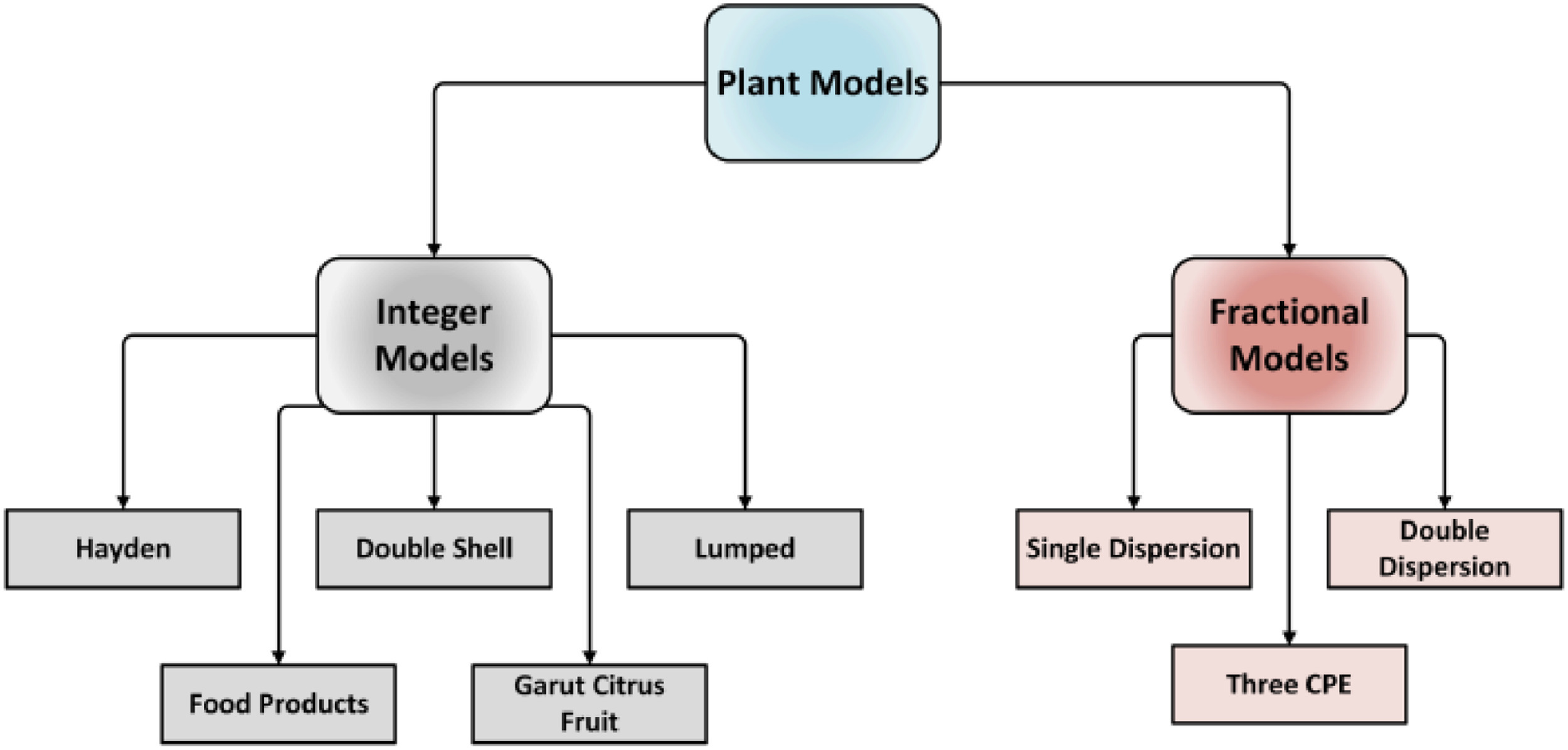
Experimental investigation of innovative active packaging biofilms using electrical impedance spectroscopy
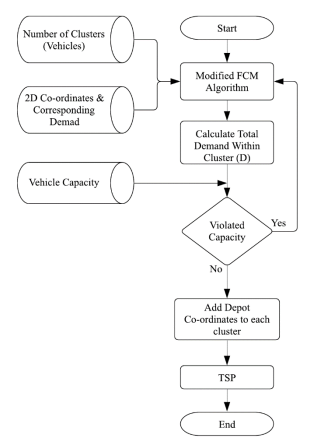
Supervised fuzzy C-means techniques to solve the capacitated vehicle routing problem
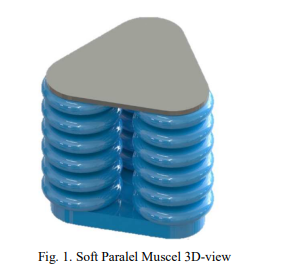
Design and FEA-based Methodology for a Novel 3 Parallel Soft Muscle Actuator
Recently, soft robotics represents a new era of advanced robotics systems. Based on the flexible nature of soft robots, they are more adequate to have safe interaction with humans and handle complex or delicate objects. Due to the nature of soft robotics, there is a crucial need to propose new designs, fabrication, and control systems suitable for the flexibility nature. In this research project
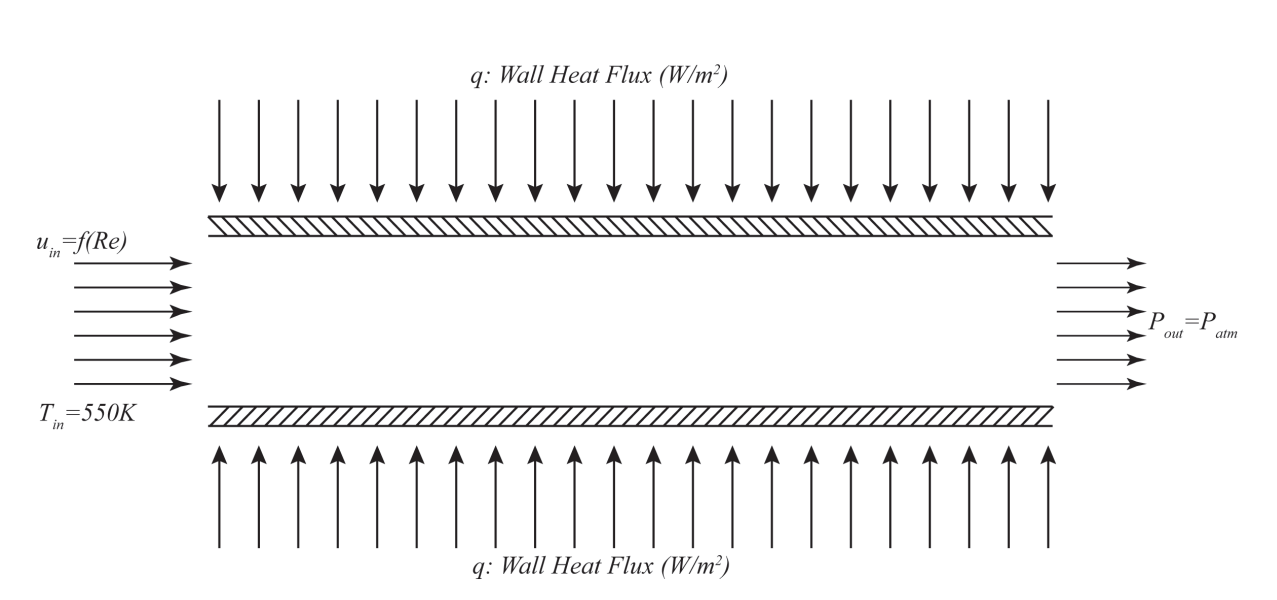
Comparative Study of Nusselt Number Correlations for Hitec Molten Salt
Molten salt has been realized as a potential candidate as a clean non-pollutant heat transfer fluid for concentrated solar power plants because of its high heat capacity and broad ranges of operational temperatures. In this study, the Nusselt number of the commercially known Hitec molten salt is numerically assessed, using k-ϵ model turbulence model with non-equilibrium wall functions, for the

Decision Support Using Simulation to Improve Productivity: A Case Study
The use of modeling and simulation as a decision aid tool has been widely recognized in the field of production engineering. In this work, modeling and simulation is used to examine, analyze, and recommend improvements for the performance of an existing assembly line within a manufacturing facility. Several key performance indicators (KPIs) are determined to evaluate the performance of the
Solving Inverse Kinematics of a 7-DOF Manipulator Using Convolutional Neural Network
This paper presents a way to solve inverse kinematics of a 7-DOF manipulator using artificial neural networks. The manipulator consists of a 6-DOF articulated arm installed on a linear guide system to increase the workspace of the robot. The purpose of this paper is to provide an alternative to the traditional and complicated way to solve inverse kinematics by using artificial neural networks. The
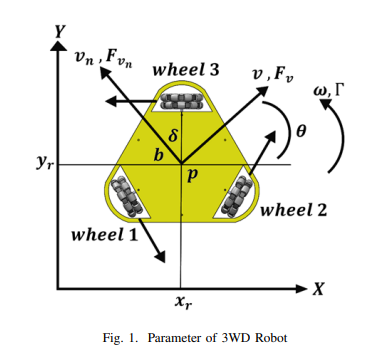
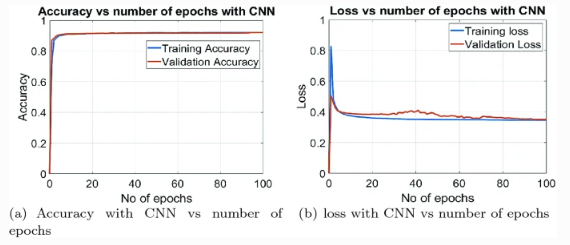
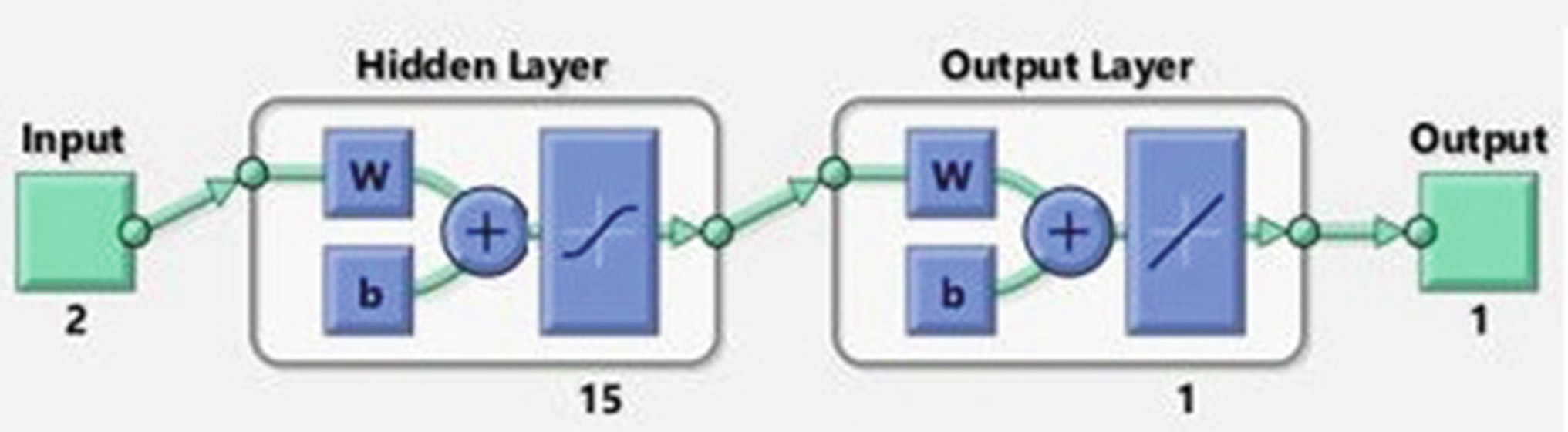
Modeling and control of 3-omni wheel Robot using PSO optimization and Neural Network
Omni mobile robots are one of the mobile robots that interact with humans in many areas where it is needed to be collaborative and accurate. Committing robotics with artificial intelligence-based controllers became nowadays mandatory for more association of these robots with distinct environments. This paper proposes the distinction of the 3WD Omni Vision feedback model between Simscape and actual
Self-Driving Car Lane-keeping Assist using PID and Pure Pursuit Control
Detection of lane boundaries is the primary role for monitoring an autonomous car's trajectory. Three lane identification methodologies are explored in this paper with experimental illustration: Edge detection, Hough transformation, and Birds eye view. The next step after obtaining the boundary points is to add a regulation rule to effectively trigger the regulation of steering and velocity to the
A Neuro-Fuzzy Based Approach for Energy Consumption and Profit Operation Forecasting
In recent years, the massive growth in the scale of data is being a key factor in the needed data processing approaches. The efficiency of the algorithms of knowledge extraction depends significantly on the quality of the raw data, which can be improved by employing preprocessing techniques. In the field of energy consumption, the forecasting of power cost needed plays a vital role in determining
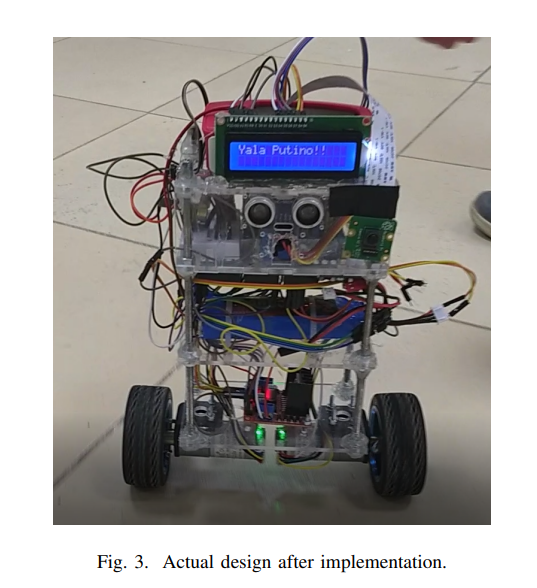
Hybrid Self-Balancing and object Tracking Robot Using Artificial Intelligence and Machine Vision
Over the past decade, mobile autonomous robots have been widely used efficiently for different applications. Recently, self-balancing robots attracted more attention and showed impressive performance. A self-balancing robot is simply a two-wheeled robot; hence it needs to be balanced vertically using a closed-loop control algorithm. In this paper, a new hybrid two-wheeled self-balancing robot is