
Research Project
Research Project
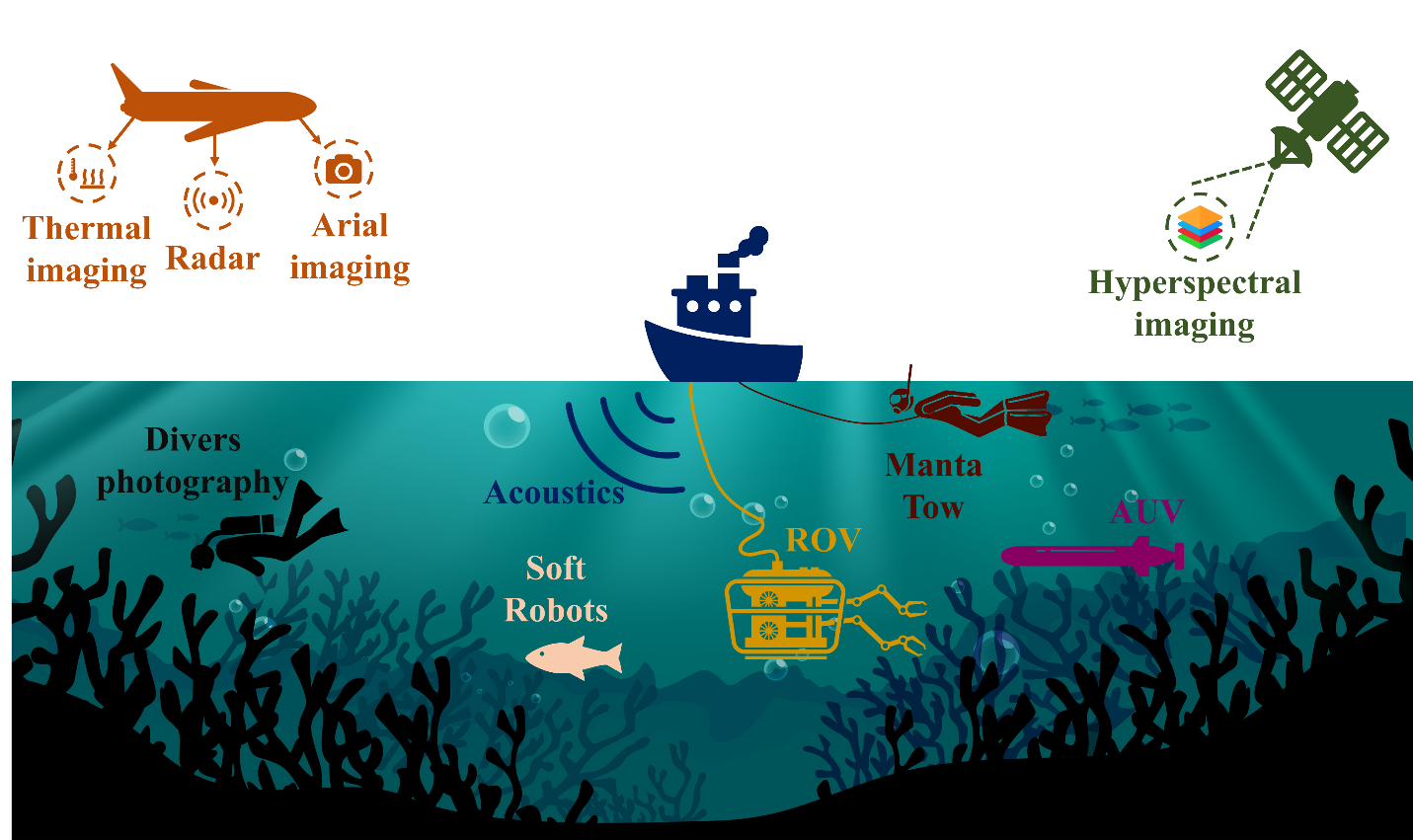
Bio-Mimetic Locomotion of Soft Turtle Robot
Abstract Amphibious robots have great potential for a variety of applications, but their design can be complex and expensive. Bio-inspired soft robotics offers a promising solution, as their actuators can perform evenly on land and underwater. Our robot takes inspiration from turtle locomotion as it bridges the gap between traditional four-legged robots and swimming robots. The robot can be
Research Project
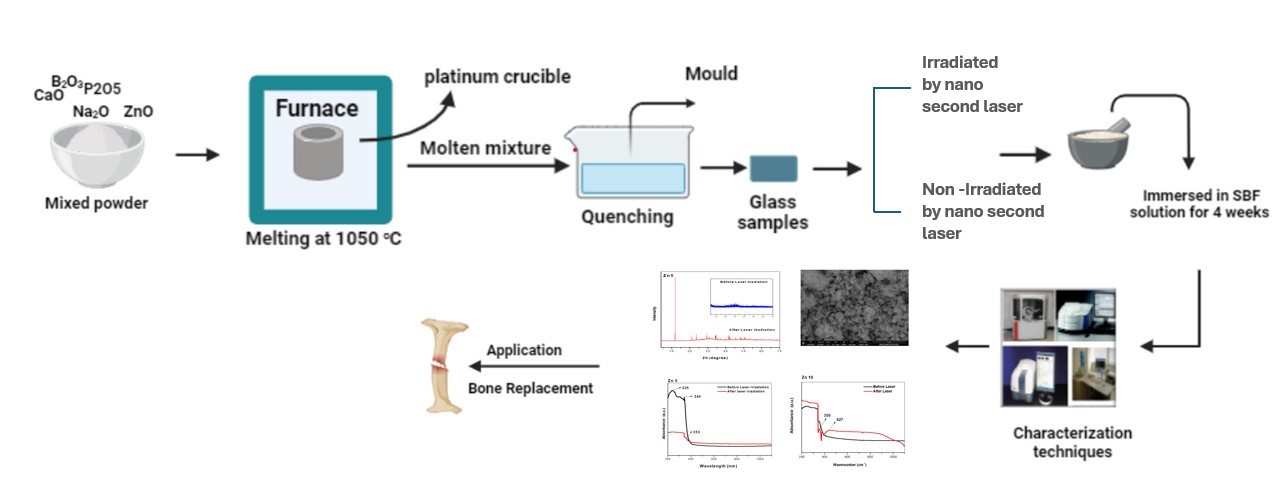
Enrichment of biological activity of zinc doped borate glasses by nano second laser irradiation
Abstract The project explores the use of Nd: YAG laser irradiation to synthesize nano bioactive glass for bone replacement. The technique involves precipitating nanoparticles in a glassy matrix, such as borate glasses, doped with zinc oxide (ZnO) using a melt quenching technique. The effects of different concentrations of ZnO on the glasses' structural and optical properties were studied using
Research Project
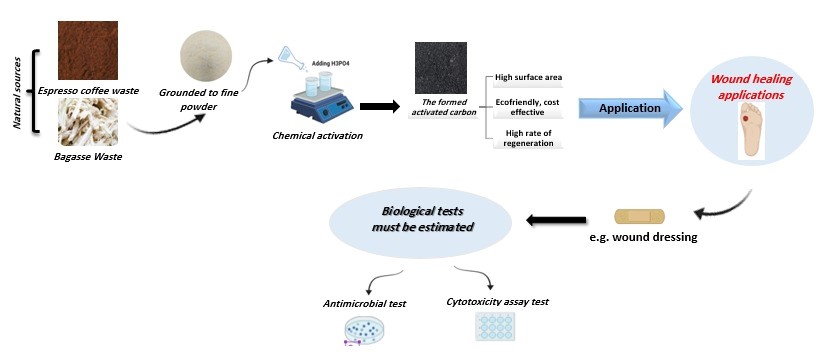
Activated Carbon Nanoparticles for Enhanced Wound Healing and Tissue Regeneration
Abstract Activated carbon nanoparticles (ACNPs) are novel antimicrobial materials being explored for wound healing and tissue regeneration. ACNPs can be coated on fabrics to provide antibacterial protection. Porous ACNPs can absorb impurities and toxins from wounds, acting as effective wound dressings. To evaluate their effectiveness and safety, antimicrobial testing and cytotoxicity assays are
Research Project
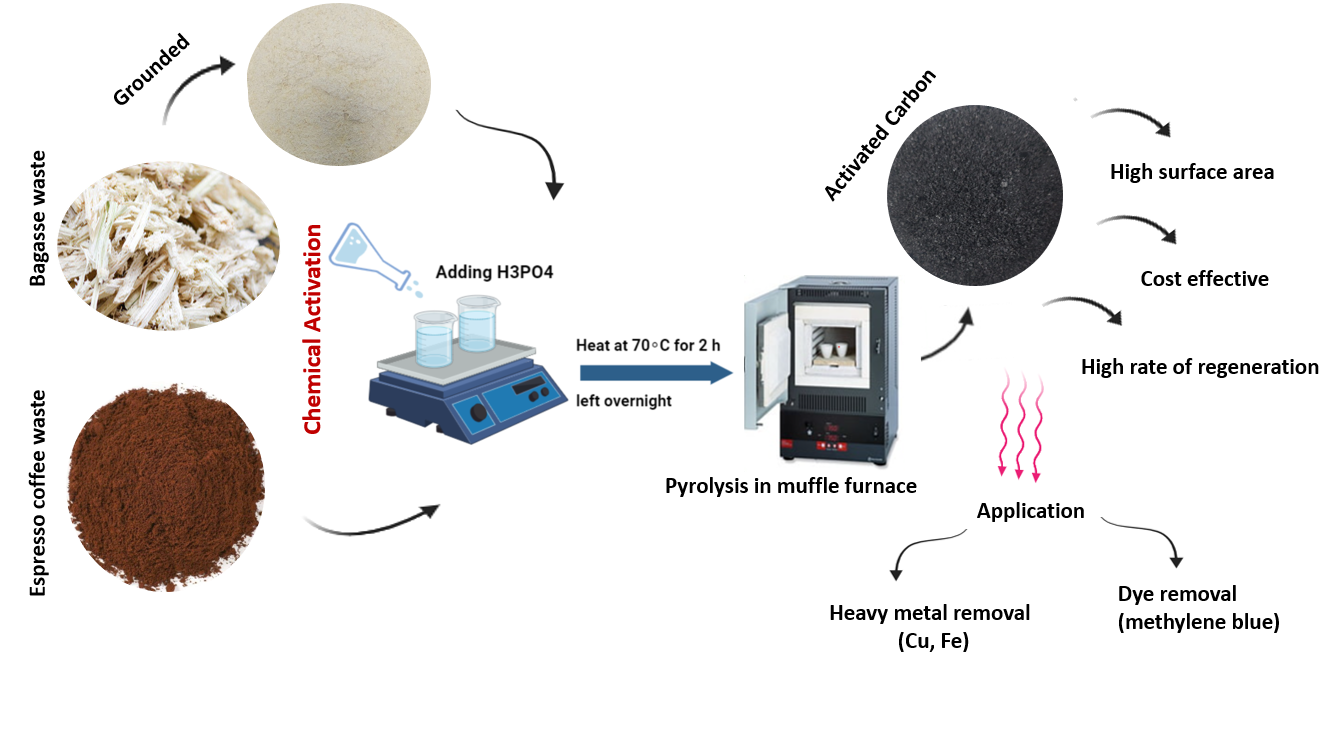
Activated carbon- from agricultural waste for removal of industrial dyes and heavy metals
Abstract The production of activated carbon from bagasse and coffee waste is a promising approach for sustainable waste management and the production of a valuable material. Bagasse, the fibrous residue from sugarcane processing, and coffee waste, such as coffee grounds or husks, are abundant agricultural by-products with high carbon content. The resulting activated carbon exhibits excellent
Research Project
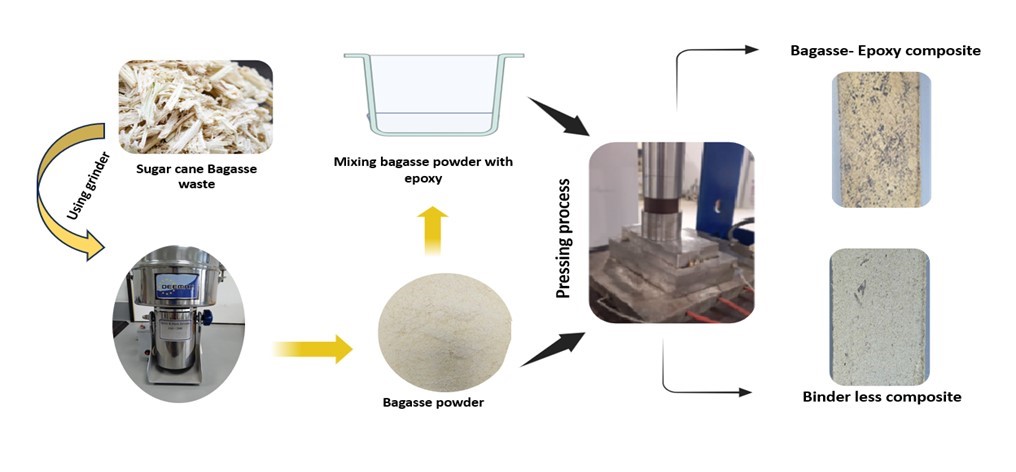
Sugarcane Bagasse Recycling for Wood-Based Panels
Abstract The project explores the recycling and reuse of organic waste fibers sugarcane bagasse (SCB). The project investigates the chemical, physical, and mechanical properties of SCB, its production percentage in Egypt, and particle board production from SCB. The project investigates the mechanical properties of a composite material made from sugar cane and epoxy. The addition of epoxy resin
Research Project
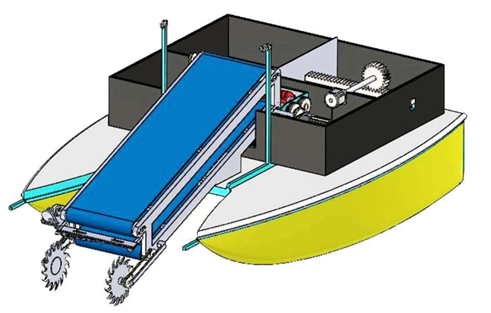
Developing a Floating Robot for Mechanical Control of Water Hyacinth
Abstract Water hyacinth has become widespread in freshwater bodies in several countries, leading to various issues, particularly its substantial water consumption and the resulting need to control its growth. Among the different methods of controlling water hyacinth, mechanical control stands out as the most effective and environmentally friendly approach. A proposed harvester robot has been
Research Project
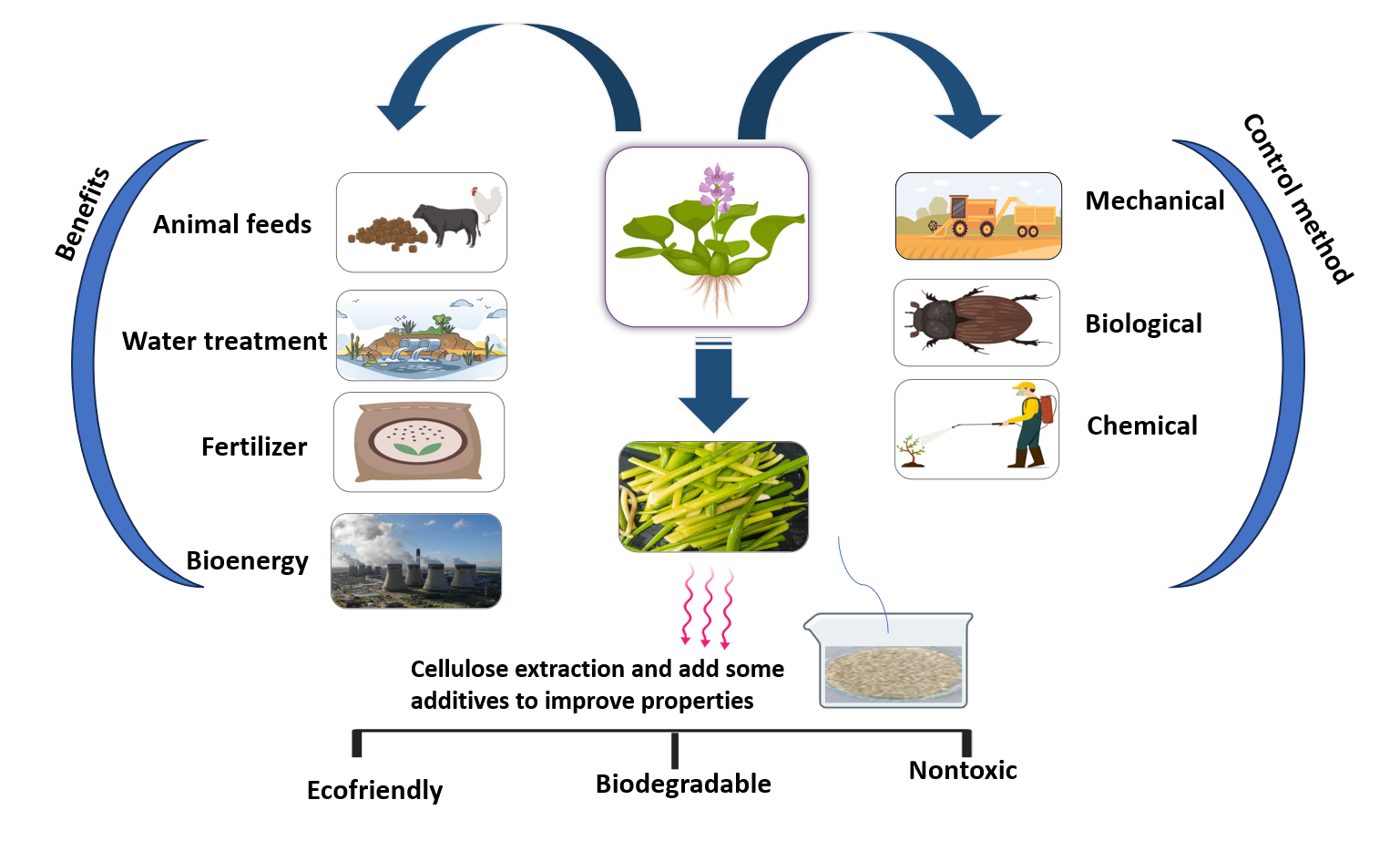
Managing and Recycling Water Hyacinth: Challenges, Methods, and Benefits
Abstract Water hyacinth, an invasive aquatic plant, poses significant challenges to water bodies worldwide. Control methods include mechanical removal, biological suppression using naturalenemies, and chemical use of targeted herbicides. Integrated approaches that combine multiple methods have proven successful in managing water hyacinth infestations. Benefits include restoring water flow
Research Project
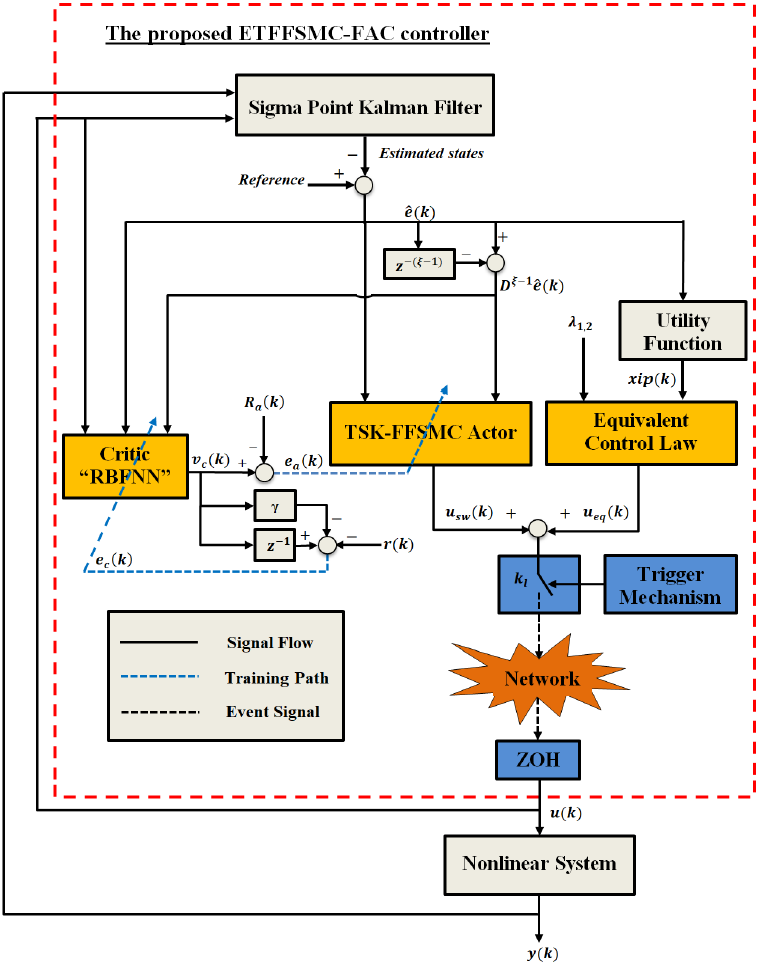
Observer-Based Adaptive Event-Triggered Fractional-Order Sliding Mode Control Using Online Fractional-Order Learning Approach
Abstract This project introduces an innovative adaptive event-triggered control strategy (ETS) for networked uncertain nonlinear systems with unmeasured states. The proposed method, called ETFFSMC-FAC, combines a fractional-order fuzzy sliding mode controller with a fractional-order actor-critic (FAC) approach. Initially, unmeasured states are estimated using a sigma-point Kalman filter (SKF)
Research Project
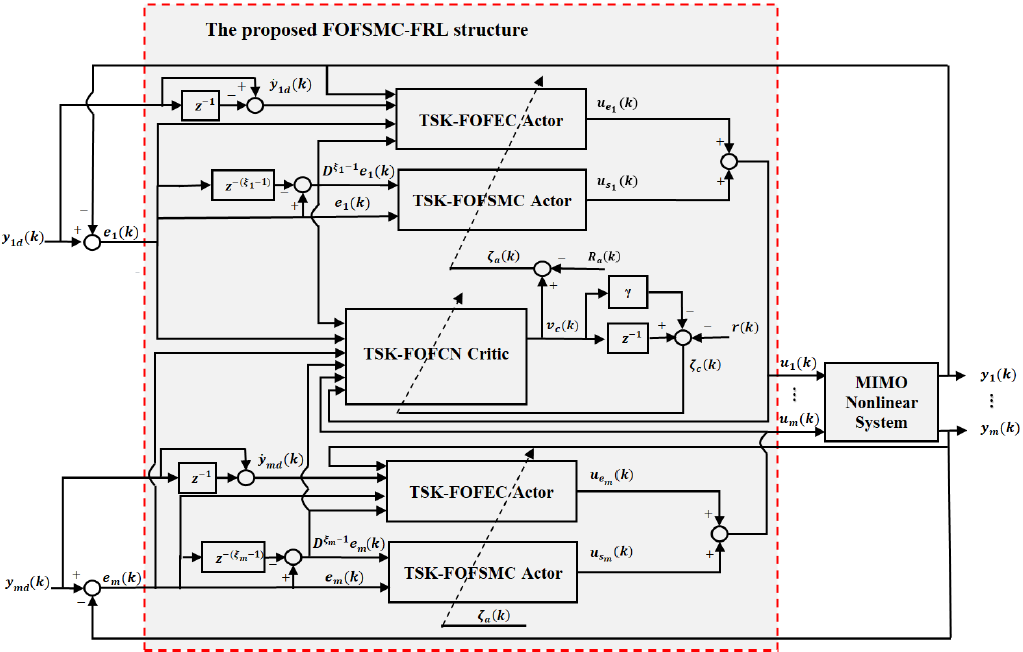
Fractional-order Fuzzy Sliding Mode Control of Uncertain Nonlinear MIMO Systems Using Fractional-order Reinforcement Learning
Abstract This project presents a novel approach to enhance the control performance of unknown multiple-input and multiple-output (MIMO) nonlinear systems. The proposed method integrates a fractional-order fuzzy sliding mode controller with online fractional-order reinforcement learning (FOFSMC-FRL). The controller utilizes two Takagi–Sugeno–Kang (TSK) fuzzy neural network actors to approximate the