
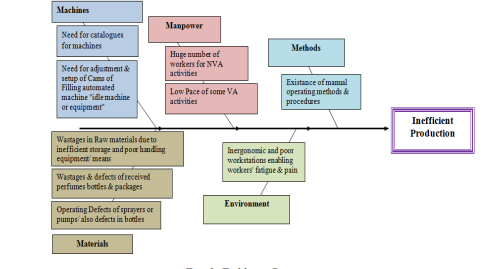
Improving Productivity of A Production Line in Perfumes Industry in Egypt Using Lean Manufacturing Methodology
This study presents proposed solutions for increasing the productivity of a production line in the perfumes industry in Egypt using lean manufacturing methodology. Enhancing efficiency is a major significant objective to consider in a typical manufacturing firm to improve the overall performance. Increasing productivity is achieved through applying an extensive lean program implementing appropriate lean tools to solve problems identified as wastage in materials and activities as well as bottlenecks increasing lead time. Information of current problems and gaps are gathered through visits and

Fabrication of bio-plastic composite pellets from agricultural waste and food waste

Gray Wolf Optimization of Fractional Order Control of 3-Omni Wheels Mobile Robot: Experimental Study
Committing robotics with artificial intelligence becomes mandatory collaboration with distinct environments. Omnidirectional Wheeled (Omni-WD) mobile robots are one of the robots that interact with humans in various circumstances, where it is important to function effectively and accurately. In this paper, the distinction of a 3WD-Omni model and control using machine vision is demonstrated. The use of fractional order (FO) calculus has been stated to increase the degrees of freedom of the controller over the integer ones. Hybridization of FO control and metaheuristics optimization is reported
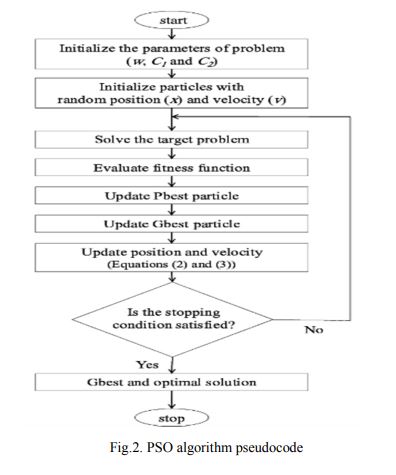
Controller Design and Optimization of Magnetic Levitation System (MAGLEV) using Particle Swarm optimization technique and Linear Quadratic Regulator (LQR)
Magnetic Levitation System is one of practical examples which faces some nonlinearities behavior. Such systems require special types of controller parameters consideration for accurate results. In this paper, the process of tuning is to determine the system poles and getting them away from the instability region using state feedback (SF) controller methodology. The resulted controllable system parameters are estimated using LQR controller. Since the desired goal is to minimize vital parameters in the system behavior like the steady state error, settling time, raising time of the system and
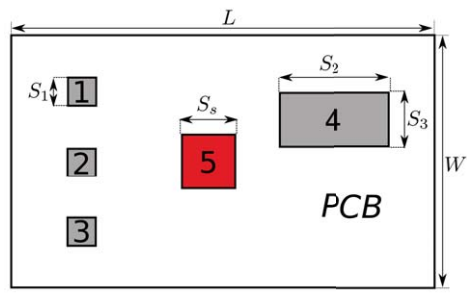
The effect of the geometric and thermal parameters on the thermal stresses during the passive cooling of printed circuit boards
The effect of components' thermal properties in addition to their geometric configuration on the developed thermal stress in a model printed circuit board (PCB) is investigated. This effect is quantified through three parameters, the average normalized temperature gradient, maximum normalized temperature gradient and the uniformity factor. It is found that the effect of the geometric configuration, especially that of the heat-generating component, is more significant than the thermal properties of the components. © 2019 IEEE.

Tandem Organic Solar Cell Optimization Using Response Surface Methodology
Organic solar cells have many advantages such as their ease of manufacturing, flexibility, and low cost compared to perovskite and silicon solar cells. However, increasing their power conversion efficiency (PCE) is still challenging. In this paper, response surface methodology of design of experiments (DOE) is used to optimize the PCE of a tandem organic solar cell. The cell is based on boron sub-phthalocyanine to reduce the series resistance between the layers. The optimization process is performed by formulating an empirical polynomial regression model relating the PCE to the active layers'
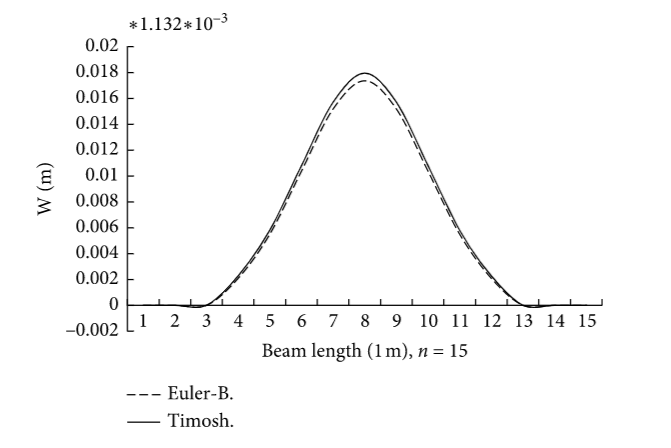
Analysis of Tapered Timoshenko and Euler-Bernoulli Beams on an Elastic Foundation with Moving Loads
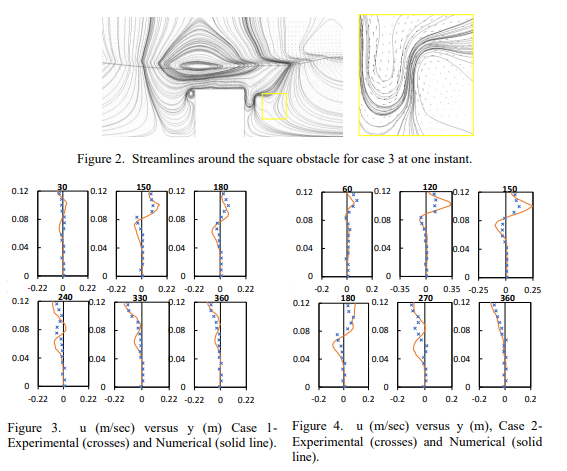
Modeling complex flow induced by water waves propagation over submerged square obstacles
Submerged breakwaters are efficient structures used for shore protection. Many design features of these structures are captured upon modeling wave propagation over submerged square obstacles. The presence of separation vortices and large free surface deformations complicates the problem. A multiphase turbulent numerical model is developed using ANSYS commercial package. Careful domain discretization is done employing suitable mesh clustering to capture high gradients. Various numerical model parameters are provided, including grid size and time step. Special attention is directed towards
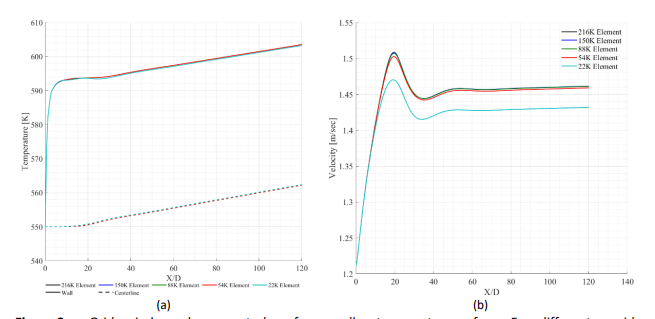
Turbulent Axisymmetric Non-Isothermal Flow of the Hitec Molten Salt with Temperature Dependent Properties: A Numerical Investigation
